
Line Follower Robot
A line follower robot is a robot which follows a certain path controlled by a feed back mechanism.
Building a basic line follower robot:
Building a basic Line Follower Robot involves the following steps.
- Designing the mechanical part or the body of the robot
- Defining the kinematics of the robots
- Designing the control of the robot
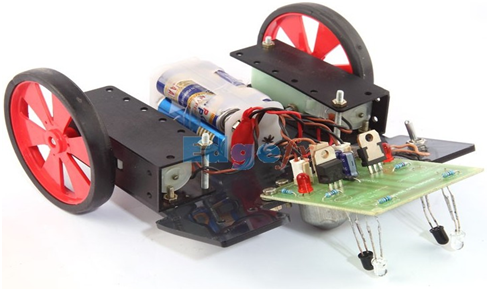
The mechanical part or body of the robot can be designed using AutoCAD or Workspace. A basic Line follower robot can consist of a base at the two ends of which the wheels are mounted. A rectangular sheet of hard plastic can be used as the base. Further a rigid body like a cylinder can be added along with other shaped bodies inter connected with each other by joints, and each with its defined motion in particular direction. The Line follower robot can be a wheeled mobile robot with a fixed base, a legged mobile robot with multiple rigid bodies interconnected by joints.
The next step involves defining the Kinematics of the robot. Kinematic analysis of the robot involves the description of its motion with respect to a fixed coordinate system. It is concerned mainly with the movement of the robot and with motion of each body in case of a legged robot. It generally involves the dynamics of the robot motion. The whole trajectory of the robot is set using the Kinematic analysis. This can be done using Workspace software.
The control of the robot is the most important aspect of its working. Here the term control refers to the robot motion control, i.e. controlling the movement of the wheels. A basic line follower robot follows certain path and the motion of the robot along this path is controlled by controlling the rotation of wheels, which are placed on the shafts of the two motors. So, the basic control is achieved by controlling the motors. The control circuitry involves the use of sensors to sense the path and the microcontroller or any other device to control the motor operation through the motor drivers, based on the sensor output.